|
|
|
|
|
|
|
|
|
|
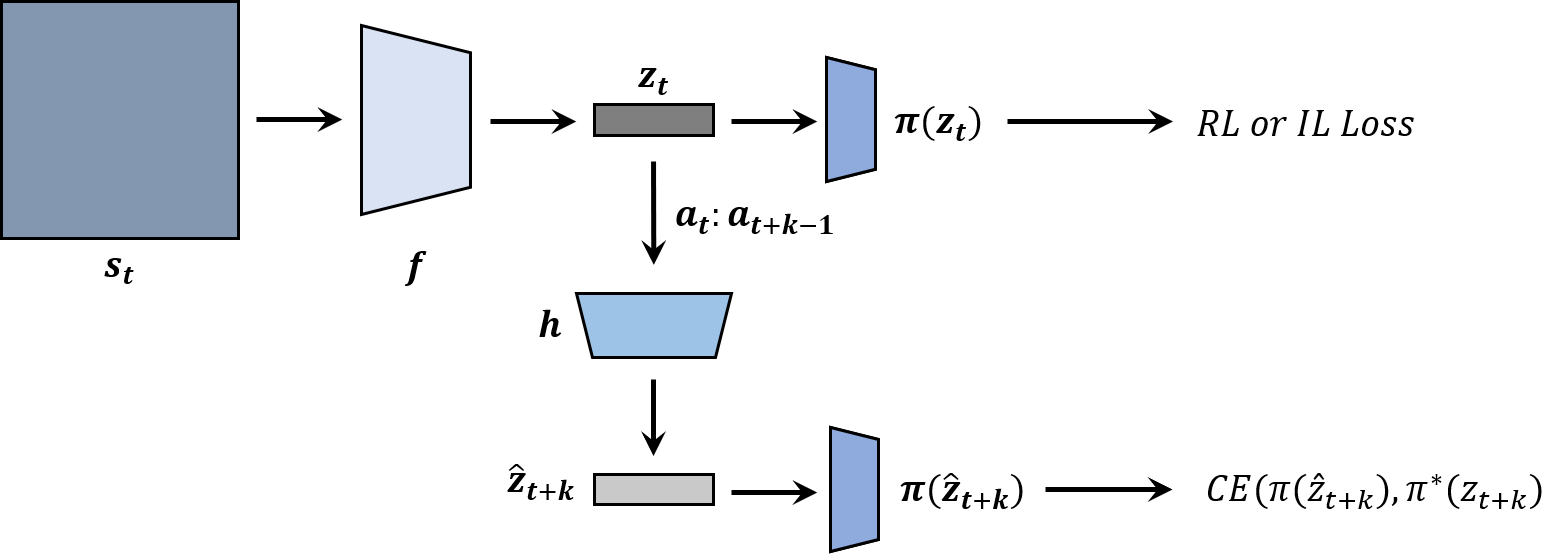
Siddhant Agarwal, Aaron Courville, Rishabh Agarwal Behavior Predictive Representations for Generalization in Reinforcement Learning 7th Workshop on Deep Reinforcement Learning and Ecological Theory of Reinforcement Learning at Thirty-fifth Conference on Neural Information Processing Systems (NeurIPS), 2021 [PDF] [Video Presentation] [Poster] [Slides] |